Problem + Model
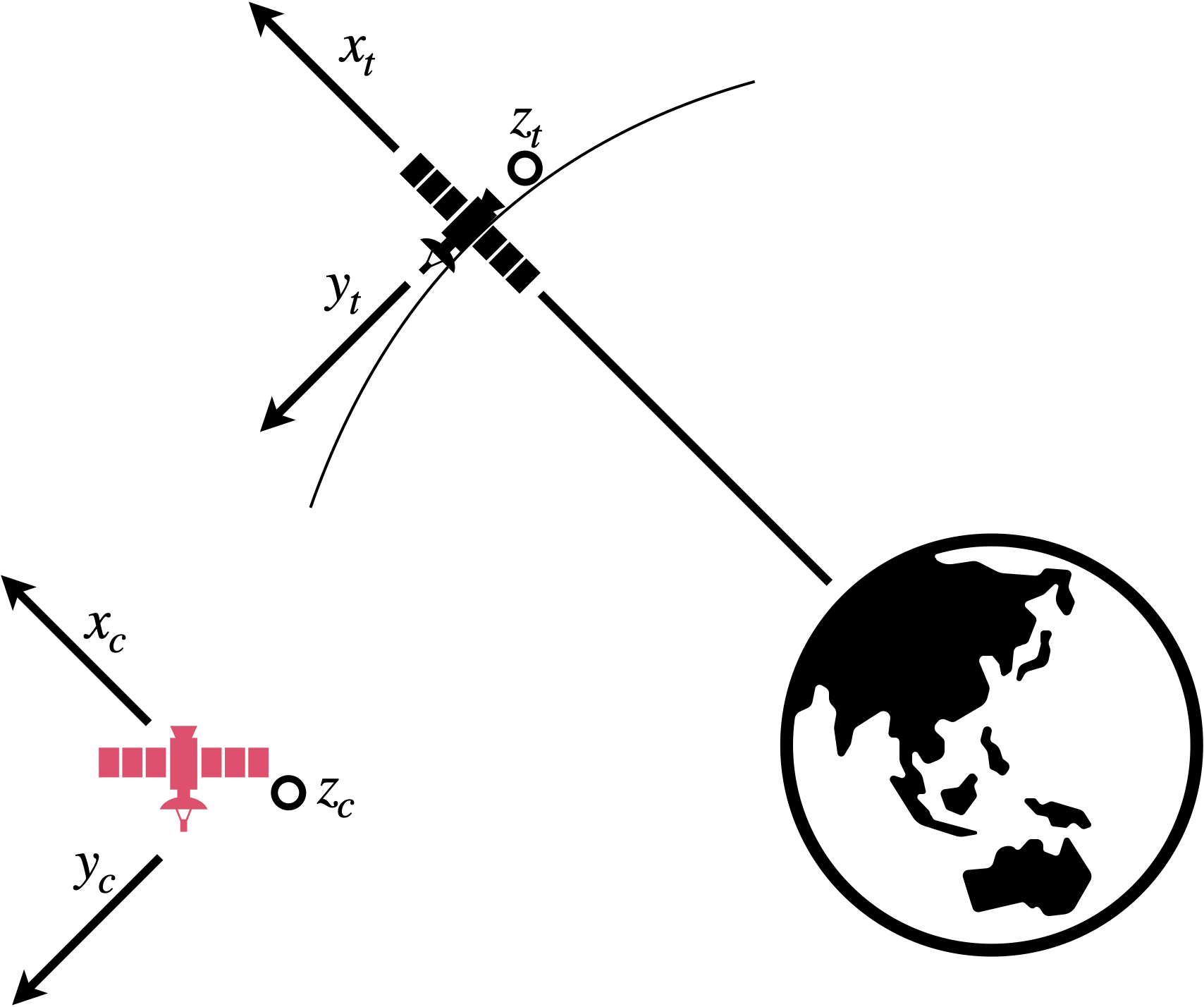
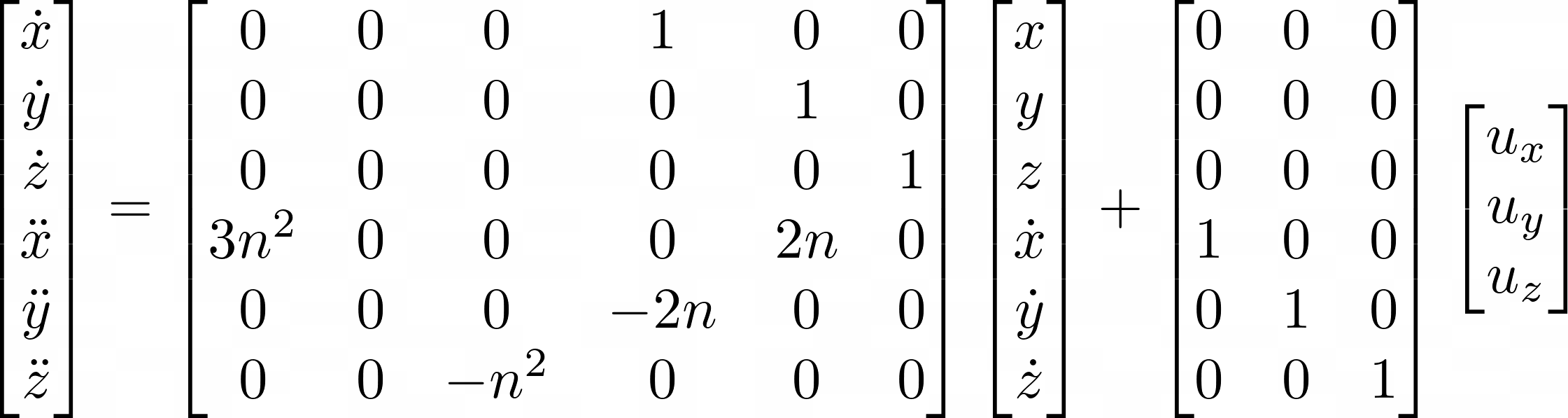
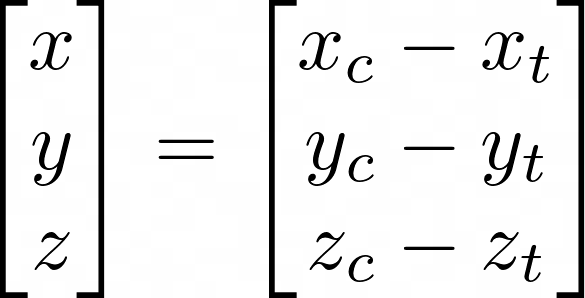
Chaser-target relative motion is modeled in the Hill frame using the linear HCW equations, then discretized with a zero-order hold map for controller synthesis and simulation.
Controller constraints include bounded acceleration magnitude per axis and terminal-state targeting. The acceleration limit used is
±0.5 mm/s2, motivated by recent constant-thrust rendezvous literature.
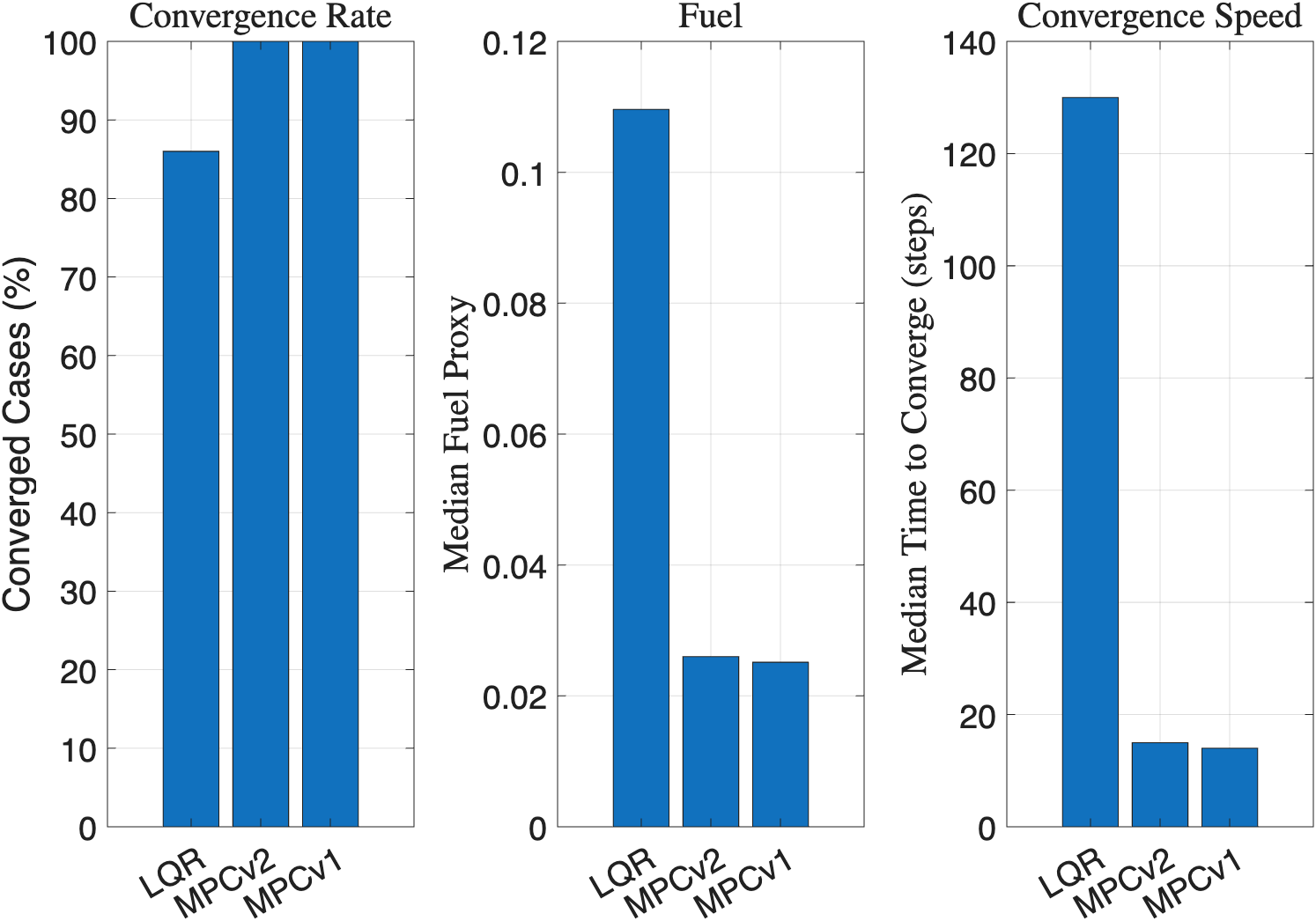
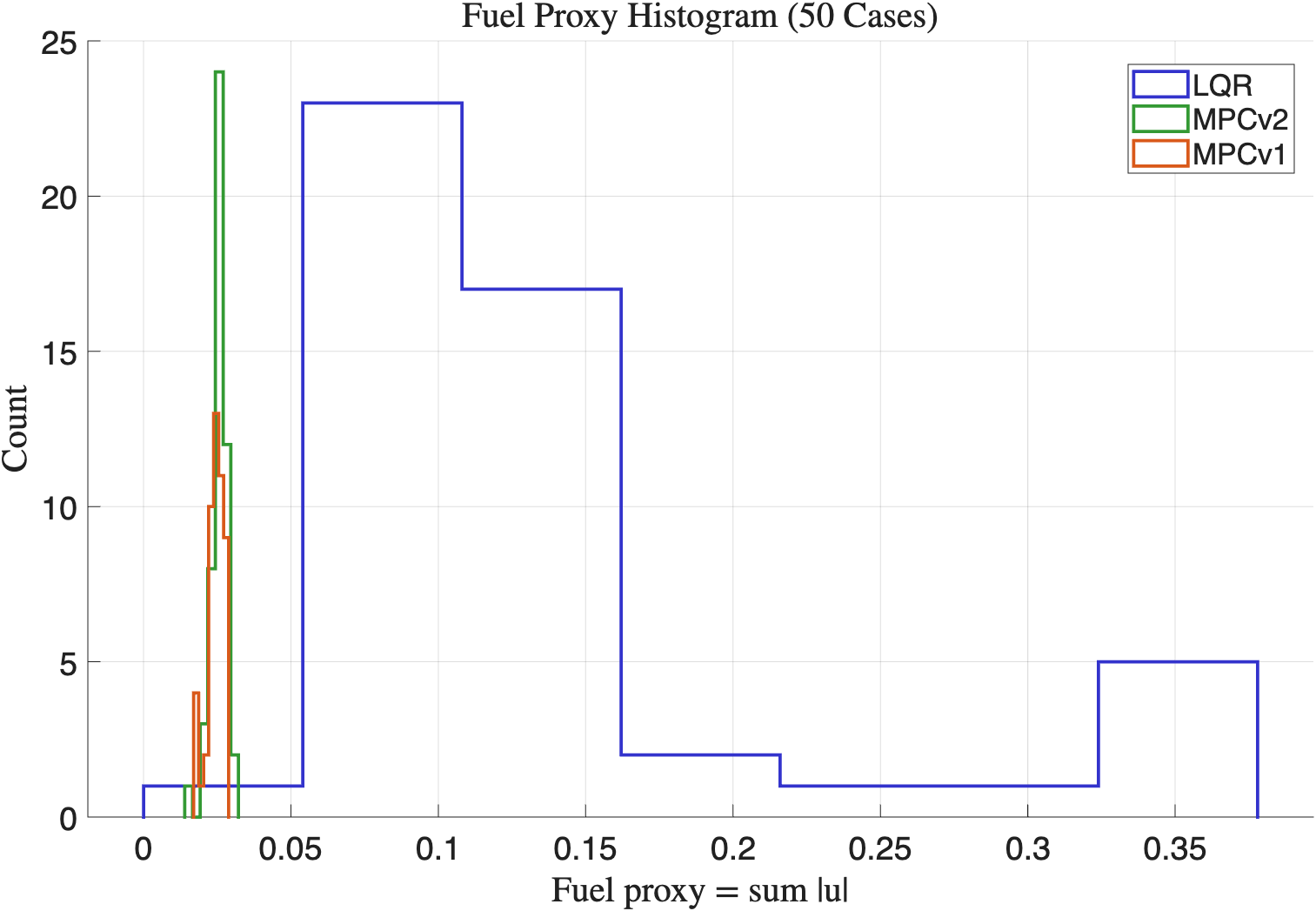
The project compares three controllers on a common model and random initial-condition sweeps:
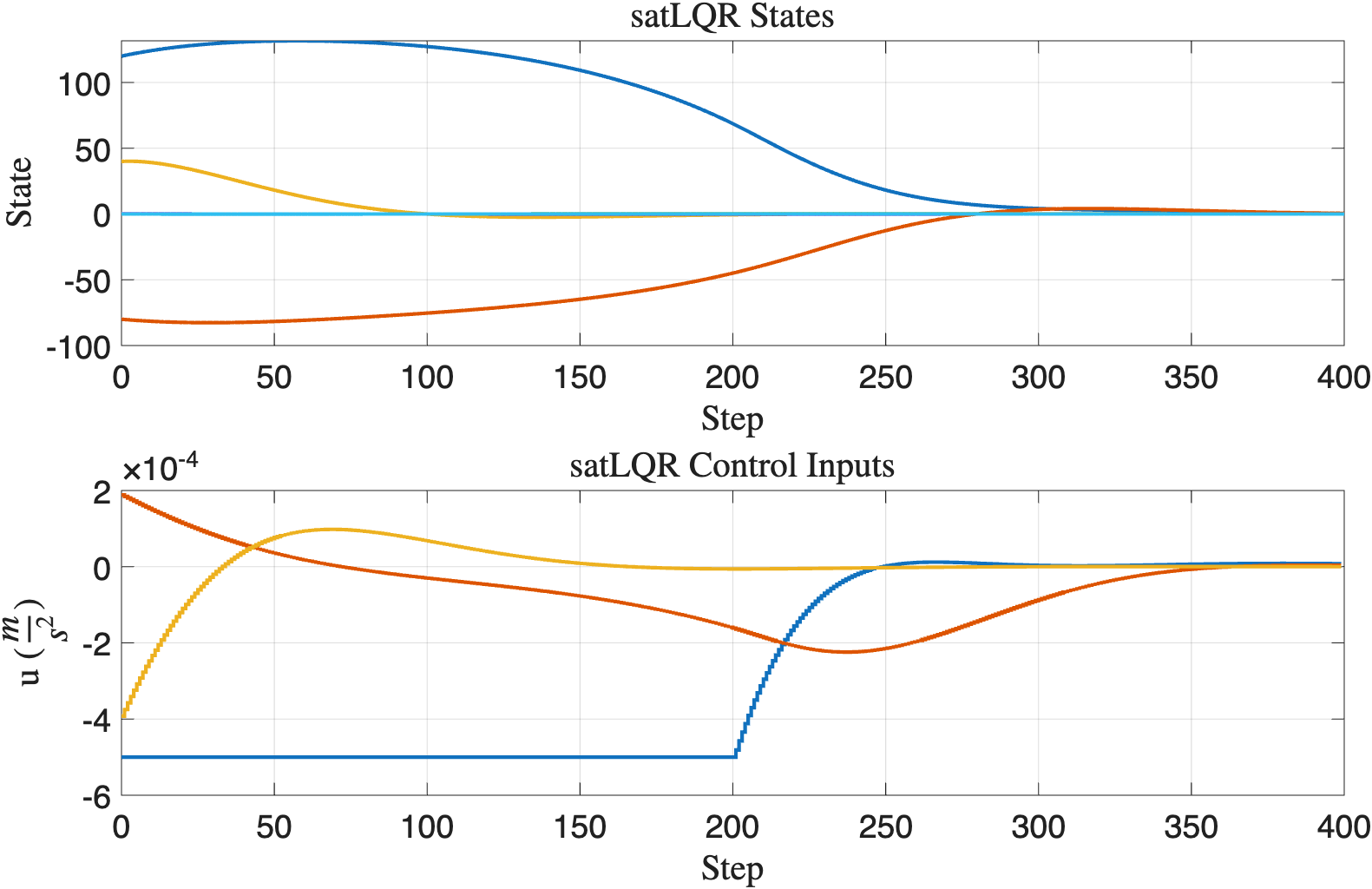
- Saturated LQR baseline
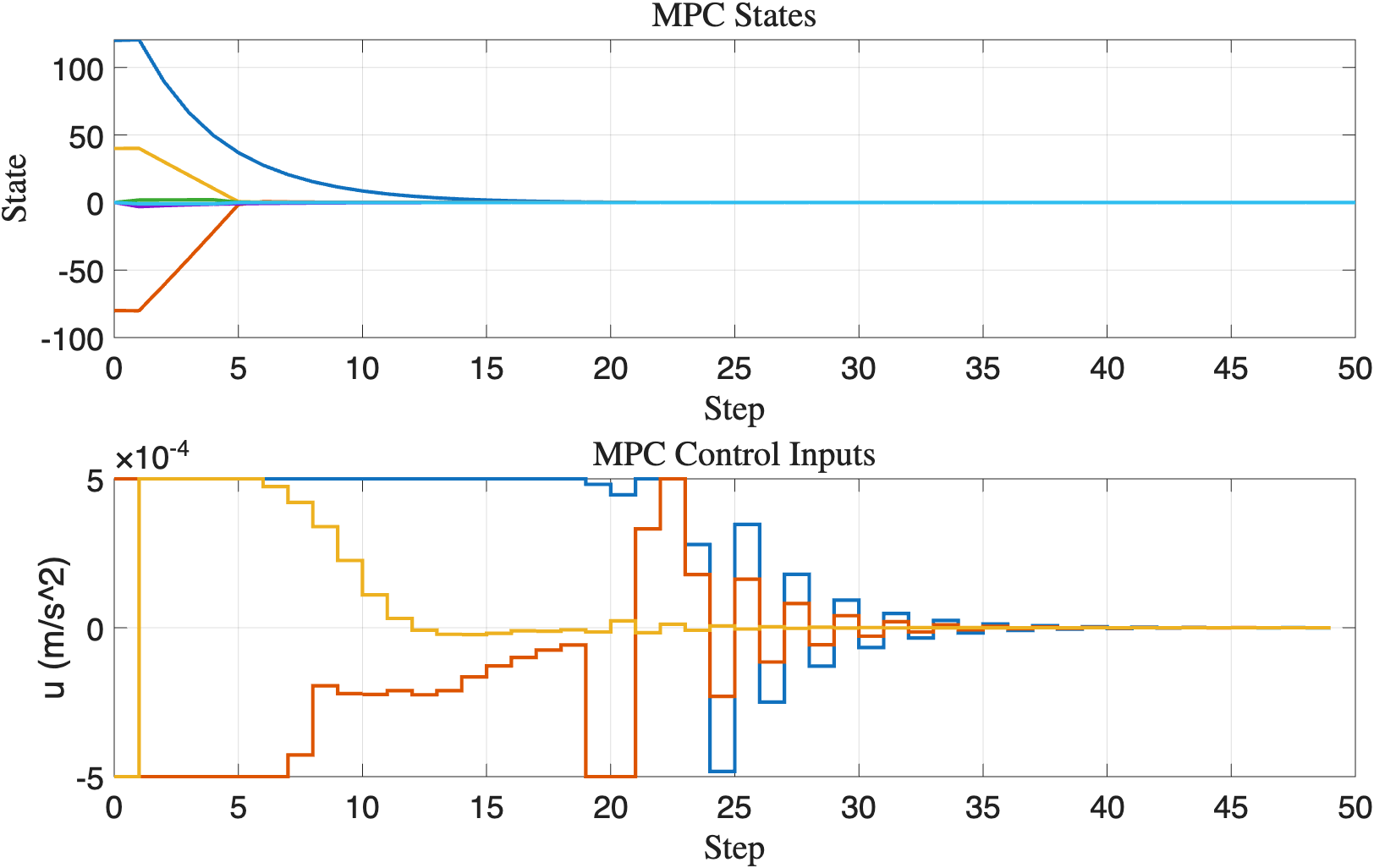
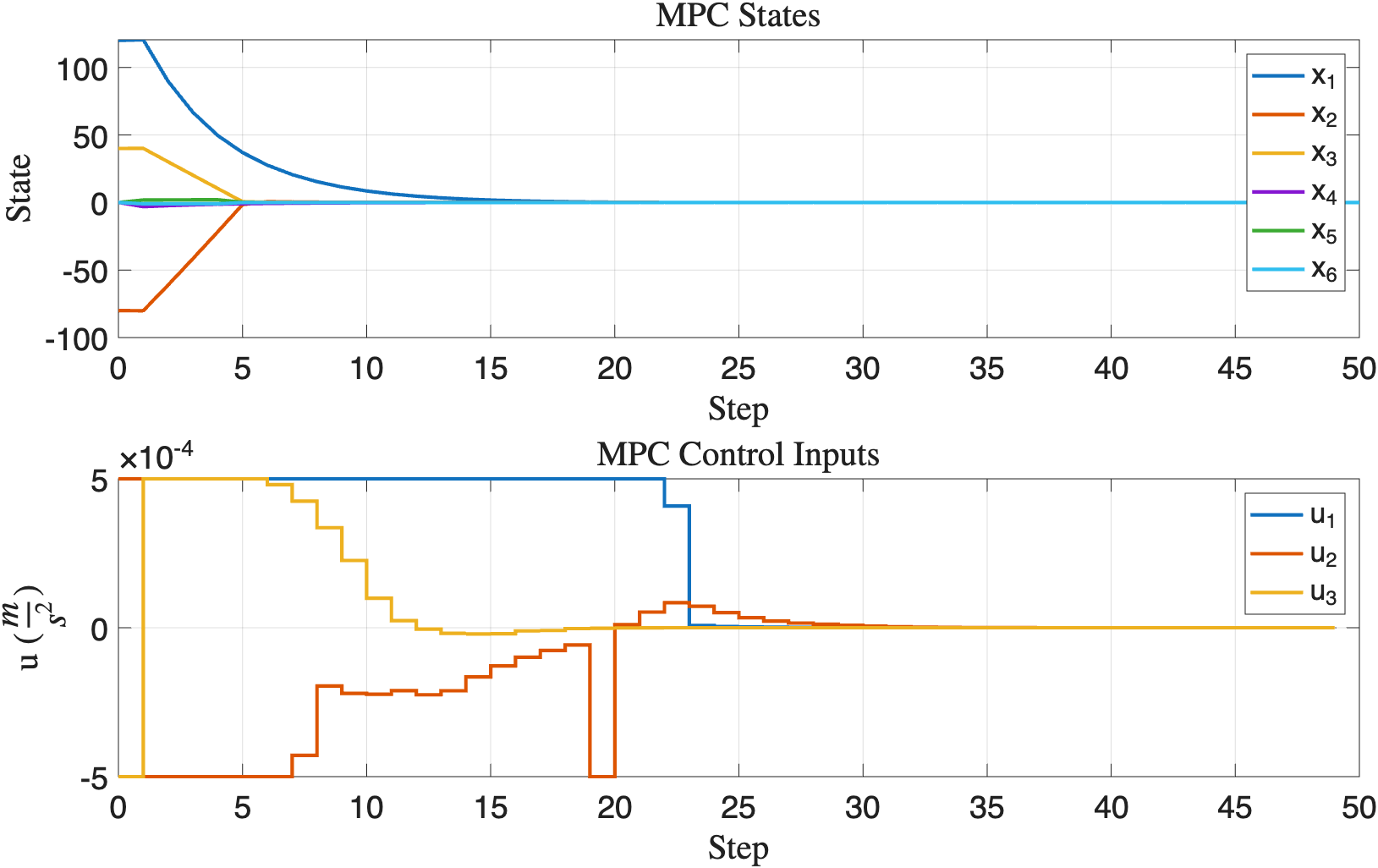
- MPCv2: state-focused constrained MPC
- MPCv1: economic MPC with fuel-prioritized cost